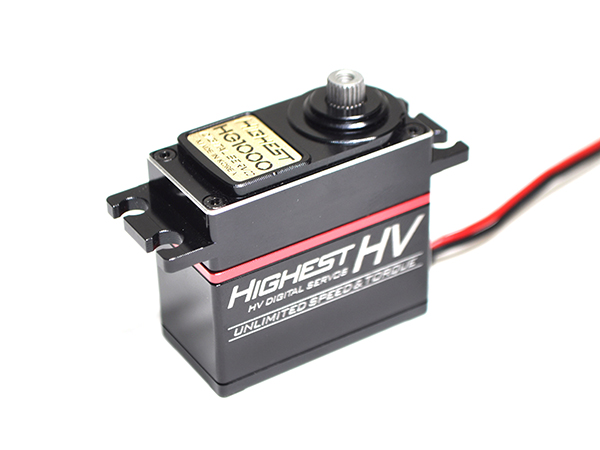
전원:4.8V~6.0V/토크:7.2Kg.cm~7.9Kg.cm/사이즈:39.5 * 20.0 * 38.6 mm/- 일반적 서보에서 발생하는 디지털 소음이 미발생- 32bit mcu를 사용하여 높은 해상도 구현 ( Resolution 4096) - stall torque가 아닌 부하시 측정된 리얼 토크 - 정밀 기어 가공으로 기어 Blackslah 없음 - 빠른 응답속도로 인해 세밀한 컨트롤 가능
전원:4.8V~6.0V/토크:6.3Kg.cm~7.2Kg.cm/사이즈:39.5 * 20.0 * 38.6 cm/- 일반적 서보에서 발생하는 디지털 소음이 미발생- 32bit mcu를 사용하여 높은 해상도 구현 ( Resolution 4096) - stall torque가 아닌 부하시 측정된 리얼 토크 - 정밀 기어 가공으로 기어 Blackslah 없음 - 빠른 응답속도로 인해 세밀한 컨트롤 가능
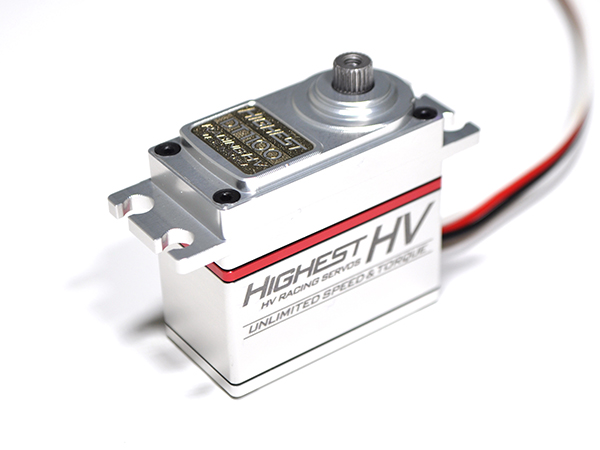
전원:6.0V~7.4V/토크:19.3Kg.cm~23.2Kg.cm/사이즈:39.5 * 20.0 * 38.6 mm/- 일반적 서보에서 발생하는 디지털 소음이 미발생- 32bit mcu를 사용하여 높은 해상도 구현 ( Resolution 4096) - stall torque가 아닌 부하시 측정된 리얼 토크 - 정밀 기어 가공으로 기어 Blackslah 없음 - 빠른 응답속도로 인해 세밀한 컨트롤 가능
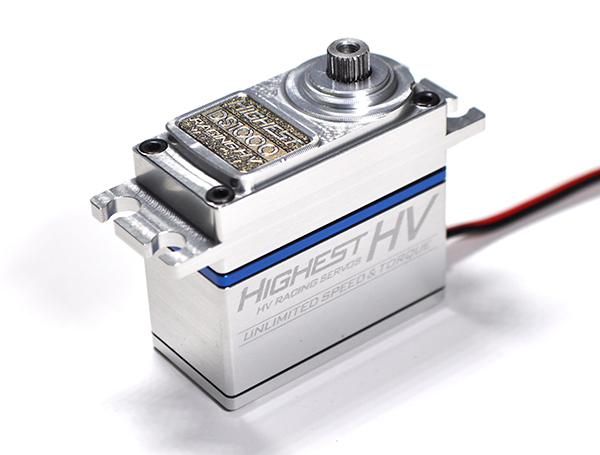
전원:6.0V~7.4V/토크:17.8Kg.cm~21.7Kg.cm/사이즈:395 * 200 * 387 mm/- 일반적 서보에서 발생하는 디지털 소음이 미발생- 32bit mcu를 사용하여 높은 해상도 구현 ( Resolution 4096) - stall torque가 아닌 부하시 측정된 리얼 토크 - 정밀 기어 가공으로 기어 Blackslah 없음 - 빠른 응답속도로 인해 세밀한 컨트롤 가능
전원:6.0V~7.4V/토크:13.8Kg.cm~16.2Kg.cm/사이즈:39.5 * 20.0 * 38.6 mm/- 일반적 서보에서 발생하는 디지털 소음이 미발생- 32bit mcu를 사용하여 높은 해상도 구현 ( Resolution 4096) - stall torque가 아닌 부하시 측정된 리얼 토크 - 정밀 기어 가공으로 기어 Blackslah 없음 - 빠른 응답속도로 인해 세밀한 컨트롤 가능
전원:6.0V~7.4V/토크:15.3Kg.cm~18.9Kg.cm/사이즈:395 * 200 * 387 mm/- 일반적 서보에서 발생하는 디지털 소음이 미발생- 32bit mcu를 사용하여 높은 해상도 구현 ( Resolution 4096) - stall torque가 아닌 부하시 측정된 리얼 토크 - 정밀 기어 가공으로 기어 Blackslah 없음 - 빠른 응답속도로 인해 세밀한 컨트롤 가능
전원:6.0V~7.4V/토크:7.1Kg.cm~8.3Kg.cm/사이즈:39.5 * 20.0 * 30.3 cm/- 일반적 서보에서 발생하는 디지털 소음이 미발생- 32bit mcu를 사용하여 높은 해상도 구현 ( Resolution 4096) - stall torque가 아닌 부하시 측정된 리얼 토크 - 정밀 기어 가공으로 기어 Blackslah 없음 - 빠른 응답속도로 인해 세밀한 컨트롤 가능
전원:6.0V~7.4V/토크:12.8Kg.cm~15.8Kg.cm/사이즈/39.5 * 20.0 * 38.6 mm/- 일반적 서보에서 발생하는 디지털 소음이 미발생- 32bit mcu를 사용하여 높은 해상도 구현 ( Resolution 4096) - stall torque가 아닌 부하시 측정된 리얼 토크 - 정밀 기어 가공으로 기어 Blackslah 없음 - 빠른 응답속도로 인해 세밀한 컨트롤 가능
전원:6.0V~7.4V/토크:6.7Kg.cm~8.3Kg.cm/사이즈:395 * 200 * 387 mm/- 일반적 서보에서 발생하는 디지털 소음이 미발생- 32bit mcu를 사용하여 높은 해상도 구현 ( Resolution 4096) - stall torque가 아닌 부하시 측정된 리얼 토크 - 정밀 기어 가공으로 기어 Blackslah 없음 - 빠른 응답속도로 인해 세밀한 컨트롤 가능
전원:6.0V~7.4V/토크:6.7Kg.cm~8.3Kg.cm/사이즈:395 * 200 * 387 mm/- 일반적 서보에서 발생하는 디지털 소음이 미발생- 32bit mcu를 사용하여 높은 해상도 구현 ( Resolution 4096) - stall torque가 아닌 부하시 측정된 리얼 토크 - 정밀 기어 가공으로 기어 Blackslah 없음 - 빠른 응답속도로 인해 세밀한 컨트롤 가능
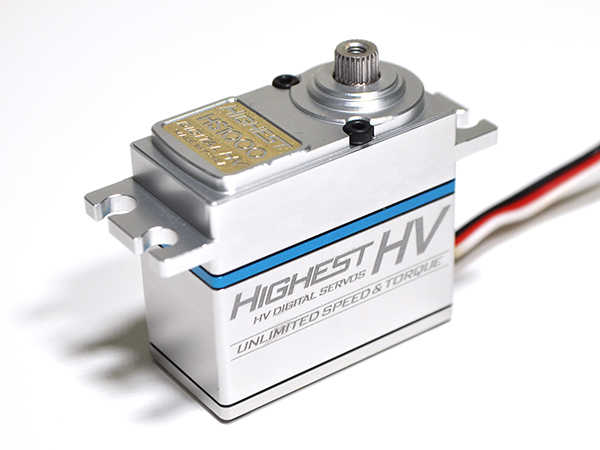
전원:6.0V~7.4V/토크:15.3Kg.cm~18.9Kg.cm/사이즈:39.5 * 20.0 * 38.6 mm/- 일반적 서보에서 발생하는 디지털 소음이 미발생- 32bit mcu를 사용하여 높은 해상도 구현 ( Resolution 4096) - stall torque가 아닌 부하시 측정된 리얼 토크 - 정밀 기어 가공으로 기어 Blackslah 없음 - 빠른 응답속도로 인해 세밀한 컨트롤 가능
전원:6.0V~7.4V/토크:15.2Kg.cm~18.4Kg.cm/사이즈:395 * 202 * 386 mm/- 일반적 서보에서 발생하는 디지털 소음이 미발생- 32bit mcu를 사용하여 높은 해상도 구현 ( Resolution 4096) - stall torque가 아닌 부하시 측정된 리얼 토크 - 정밀 기어 가공으로 기어 Blackslah 없음 - 빠른 응답속도로 인해 세밀한 컨트롤 가능
전원:6.0V~7.4V/토크:14.2Kg.cm~16.8Kg.cm/사이즈:395 * 202 * 387 mm/- 일반적 서보에서 발생하는 디지털 소음이 미발생- 32bit mcu를 사용하여 높은 해상도 구현 ( Resolution 4096) - stall torque가 아닌 부하시 측정된 리얼 토크 - 정밀 기어 가공으로 기어 Blackslah 없음 - 빠른 응답속도로 인해 세밀한 컨트롤 가능
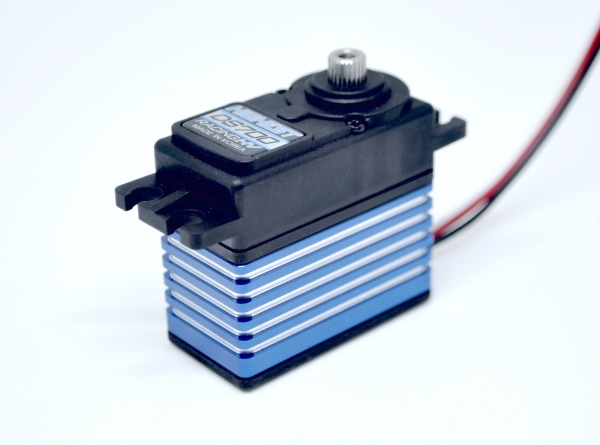
전원:6.0V~7.4V/토크:10.2Kg.cm~11.9Kg.cm/사이즈:395 * 200 * 387 mm/- 일반적 서보에서 발생하는 디지털 소음이 미발생- 32bit mcu를 사용하여 높은 해상도 구현 ( Resolution 4096) - stall torque가 아닌 부하시 측정된 리얼 토크 - 정밀 기어 가공으로 기어 Blackslah 없음 - 빠른 응답속도로 인해 세밀한 컨트롤 가능
전원:6.0V~7.4V/토크:13.2Kg.cm~16.1Kg.cm/사이즈:395 * 200 * 387mm/- 일반적 서보에서 발생하는 디지털 소음이 미발생- 32bit mcu를 사용하여 높은 해상도 구현 ( Resolution 4096) - stall torque가 아닌 부하시 측정된 리얼 토크 - 정밀 기어 가공으로 기어 Blackslah 없음 - 빠른 응답속도로 인해 세밀한 컨트롤 가능
전원:6.0V~7.4V/토크:9.9Kg.cm~11.1Kg.cm/사이즈:39.5 * 20.0 * 38.6 mm/- 일반적 서보에서 발생하는 디지털 소음이 미발생- 32bit mcu를 사용하여 높은 해상도 구현 ( Resolution 4096) - stall torque가 아닌 부하시 측정된 리얼 토크 - 정밀 기어 가공으로 기어 Blackslah 없음 - 빠른 응답속도로 인해 세밀한 컨트롤 가능