카테고리 전체보기
-

-
- 감쇠기
- RF 증폭기
- RF 안테나
- RF 복조기(Demodulator)
- RF 검출기(Detector)
- RF 다이플렉서/멀티플렉서
- RF 지향성 커플러
- RF 프런트 엔드 (LNA + PA)
- RF Misc IC 및 모듈
- RF 믹서
- RF 변조기(Modulator)
- RF 전력 컨트롤러 IC
- RF 전력 분배기/스플리터
- RF 수신기
- RF 실드
- RF 스위치
- RF 송수신 IC
- RF 송신기
- RFID 안테나
- RFID 트랜스폰더/태그
- RFID/RF 액세스/모니터링 IC
- RF/RFID 액세서리
- 발룬
- RF 서큘레이터 및 절연기
- RFI/EMI용 접점/핑거스톡/개스킷
-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-






















![Rubik Link V2.0 [AJT01010006]](/data/goods/1/2023/11/15264707_tmp_23f73beb75bc49ff7548ebe8ecddfebd7003large.jpg)
![AK45-36 KV80 + 드라이버 [AJD03010098]](/data/goods/1/2025/05/15741622_tmp_ff9c32c7861b77258bd4564e255c70f67419large.jpg)
![AK45-10 KV75 + 드라이버 [AJD03010100]](/data/goods/1/2025/05/15741620_tmp_cfdada851ce1f91eff100cfa7e219e572175large.jpg)
![AK80-64 KV80 + 드라이버 [AJD03010021]](/data/goods/1/2023/11/15264706_tmp_0e931187d2706bf509f5acf43e6706fc5587large.jpg)
![AK70-10 KV100 + 드라이버 [AJD03010018]](/data/goods/1/2023/11/15264700_tmp_162c29e240d375d6a7eb69a9a084d5f55898large.jpg)
![AK60-6 V3.0 KV80 + 드라이버 [AJD03010082]](/data/goods/1/2024/11/_tmp_39e6668a2975980e7ef54e106ff575a24990large.jpg)
![AK40-10 KV170 + 드라이버 [AJD03010097]](/data/goods/1/2025/05/15741616_tmp_b6498d4e00474c5e51a512071b100a918986large.jpg)
![Rubik Link V3.0 [AJT01010022]](/data/goods/1/2025/02/_tmp_94a64152e0144be85828403721185bc43523large.jpg)


![AK60-6 V1.1 KV140 + 드라이버 [AJD03010034]](/data/goods/1/2023/11/15264692_tmp_fb104e051b06c7608e78cb934b47b8523826large.jpg)
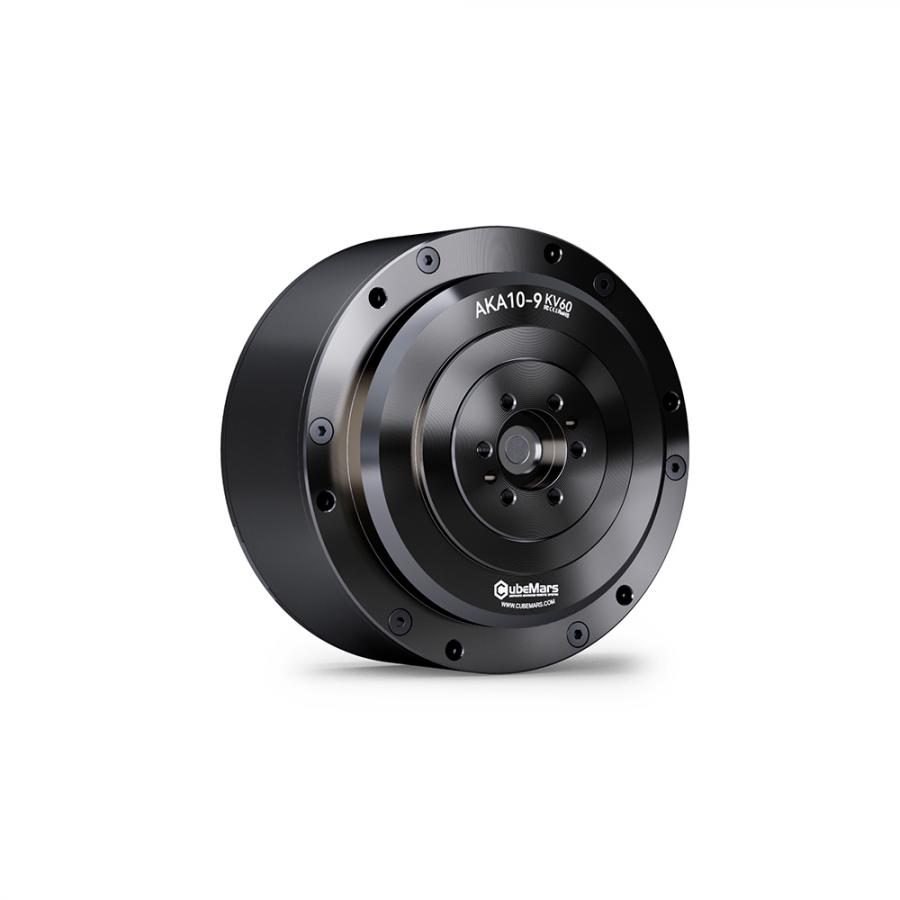
![AK10-9 V3.0 KV60 + 드라이버 [AJD03010083]](/data/goods/1/2024/11/15590071_tmp_04e389b22d1a494983150dea9b4496b49914large.jpg)

![R60 KV115 + 홀센서 포함 [AJD07010001]](/data/goods/1/2023/11/15264678_tmp_8437114b4300597ff6c1c00505bd38d92882large.jpg)

![AK V2.0 케이블 [AJT05000004]](/data/goods/1/2026/03/15991198_tmp_bb8f48a7f7588ed0d43ea3dfa4707cd01238large.jpg)

![RI 80 KV75 + 홀센서 포함 [AJD01010026]](/data/goods/1/2023/11/15264689_tmp_18b35d1dadf4f681614ec921d81f1e5f5655large.jpg)
![AK60-6 V1.1 KV80 + 드라이버 [AJD03010033]](/data/goods/1/2023/11/15264691_tmp_cbcede3f7eeba366a922fbe9d00f0e7b5428large.jpg)
![AK10-9 V2.0 KV60 + 드라이버 [AJD03010017]](/data/goods/1/2023/11/15264702_tmp_73a7d8c2b89441630c3cc83d62cd3c429256large.jpg)


![RI 60 KV120 + 홀센서 포함 [AJD01010024]](/data/goods/1/2023/11/15264687_tmp_9a6cb4e5d313490f27ae8c967765f1618234large.jpg)
![AK80-8 KV60 + 드라이버 [AJD03010057]](/data/goods/1/2023/11/15264698_tmp_d6613b858488fbc146113ee85c2efc3b1694large.jpg)
![AK80-9 V3.0 KV100 + 드라이버 [AJD03010099]](/data/goods/1/2025/05/15741640_tmp_1b4c058c1d9da9b224d24353628a0fdb7968large.jpg)


![AK70-10 KV100 [AJD03010039]](/data/goods/1/2023/11/15264699_tmp_fe4a486beda165b03f487c3b9478c8120068large.jpg)


![RI 100 KV105 + 홀센서 포함 [AJD01010027]](/data/goods/1/2023/11/15264690_tmp_6bd34b4a0e923acac6614ef40926440e8565large.jpg)


![RI 50 KV100 + 홀센서 포함 [AJD01010023]](/data/goods/1/2023/11/15264686_tmp_35003332d71d75fffa7e61067c81d9355059large.jpg)



![AK10-9 V2.0 KV100 + 드라이버 [AJD03010042]](/data/goods/1/2023/11/15264704_tmp_29eaff66ea02cc61935a236e4d1088a36399large.jpg)

![AK70-9 KV60 + 드라이버 [AJD03010096]](/data/goods/1/2025/05/15741642_tmp_3659f60ab12bf868a2fa7816ca4b6cbc2129large.jpg)
![AK V3.0 케이블 [AJT01010024]](/data/goods/1/2026/03/15991211_tmp_72e092e91b280e08f2f396b5139080346263large.jpg)
![R100 KV90 [AJD07010003]](/data/goods/1/2023/11/15264680_tmp_227ae043cc8adaec8822fff0125309af8734large.jpg)


![RI 50 KV100 [AJD01010007]](/data/goods/1/2023/11/15264681_tmp_3e98c582d519b9802041bba1d6534bc73338large.jpg)
![RI 70 KV95 + 홀센서 포함 [AJD01010025]](/data/goods/1/2023/11/15264688_tmp_1234150c57925dc7e23848daee1820570407large.jpg)


![RI 80 KV75 [AJD01010012]](/data/goods/1/2023/11/15264684_tmp_309632365442a8bbd1c8d0f92eaad79e0707large.jpg)
![RI 100 KV105 [AJD01010011]](/data/goods/1/2023/11/15264685_tmp_e10d857196001d5149546b37ca848e869063large.jpg)
![AK80-6 KV100 + 드라이버 [AJD03010010]](/data/goods/1/2023/11/15264694_tmp_9c666aded2b8883c415177f72b2b8e0d8677large.jpg)
![AK80-64 KV80 [AJD03010028]](/data/goods/1/2023/11/15264705_tmp_0b2de455c3242e57d1bc8babeeb4d4fd2160large.jpg)


![Driver board V3.0 (XL Size) [AJT01010030]](/data/goods/1/2026/03/_tmp_70564888e8303b9b60b0667626a4fb009091large.jpg)
![AK series Rubik Link V3.0 케이블 [AJT05000001]](/data/goods/1/2026/03/15991233_tmp_0dd26c10dc0641b24f7e246a4db546279406large.jpg)







![R80 KV110 + 홀센서 포함 [AJD07010002]](/data/goods/1/2023/11/15264679_tmp_229b5fc6a30fb7cbf46aa59a42c9084f1667large.jpg)
![RI 60 KV120 [AJD01010009]](/data/goods/1/2023/11/15264682_tmp_98a5c3b29411977189ac20f87eb911d84340large.jpg)
![RI 70 KV95 [AJD01010010]](/data/goods/1/2023/11/15264683_tmp_c6391552140ad866e5d18ef9ffeea6804632large.jpg)
![AK80-6 KV100 [AJD03010006]](/data/goods/1/2023/11/15264693_tmp_2f6446e29cf860234735842f07e3165d2408large.jpg)
![AK80-8 KV60 [AJD03010022]](/data/goods/1/2023/11/15264697_tmp_88960f25ed5b1e0007b98bf4147cb4903888large.jpg)
![AK10-9 V2.0 KV60 [AJD03010041]](/data/goods/1/2023/11/15264701_tmp_aa214727f9eadd2f910c201db5f51ea97932large.jpg)



















![Driver Board V1.0 (Mini Size) [AJT01010031]](/data/goods/1/2026/03/_tmp_4dfdfebd323ba064ef0eb319b380a7587540large.jpg)
![AKA V3.0 케이블 [AJT01010034]](/data/goods/1/2026/03/15991214_tmp_6009e422eb4d47ee44adfe1f846498d98984large.jpg)
![S-LINK V1.0 케이블 [AJT05000002]](/data/goods/1/2026/03/15991240_tmp_56026771a1f9e2d9d82a5158fc4c91e31294large.jpg)